在自動駕駛技術(shù)問題中,定位技術(shù)(自身定位以及對周圍環(huán)境相對位置的認知)似乎是無人駕駛汽車最難掌握的技術(shù),這與城市的動態(tài)性質(zhì)有關(guān)。例如施工路面、封閉道路、新標志和缺失的道路標志等,都是這種動態(tài)性和不確定性的例子。人類面對以上隨時隨地可能發(fā)生改變的因素都會感到困惑,更不用說機器了。目前沒有方法可以完美地解決自動駕駛汽車的定位問題,但以下幾種是當前最為有效也最有希望解決問題的辦法。不同公司有不同的傾向性選擇,本文將根據(jù)具體的公司策略對三種定位方法進行介紹。
自從特斯拉和Waymo等公司出現(xiàn)以來,車企對自動駕駛技術(shù)的關(guān)注愈發(fā)增加。汽車PCB小編了解到,這種情況在2018年更甚,從而加速了無人駕駛汽車盡快落地的可能。例如,通用汽車公司在舊金山的員工已經(jīng)用上了沒有方向盤或踏板的cruise;福特、大眾、豐田和奔馳也都在自動駕駛競爭之列;上個月,特斯拉在芯片發(fā)布會上宣布,到2020年他們將制造出完全自動駕駛汽車。
無人駕駛的實現(xiàn)前途光明,但道路曲折。目前自動駕駛仍然面臨很多難題,例如需要快速而連續(xù)地分析數(shù)據(jù)流、需要做對機器來說很繁瑣但對人類來說只是雞毛蒜皮的一些小事等。具體來說,物體檢測、距離、速度、定位和交通法規(guī)等都是在駕駛過程中做決策時需要考慮的因素。為了達到SAE標準中的L5級別,計算機駕駛系統(tǒng)需要能夠執(zhí)行上述所有基本任務(wù),找到針對不同問題的技術(shù)解決方案。
定位技術(shù)(自身定位以及對周圍環(huán)境相對位置的認知)似乎是無人駕駛汽車最難掌握的技術(shù),這與城市的動態(tài)性質(zhì)有關(guān)。例如施工路面、封閉道路、新標志和缺失的道路標志等,都是這種動態(tài)性和不確定性的例子。人類面對以上隨時隨地可能發(fā)生改變的因素都會感到困惑,更不用說機器了。目前沒有方法可以完美地解決自動駕駛汽車的定位問題,但以下幾種是當前最為有效也最有希望解決問題的辦法。不同公司有不同的傾向性選擇,本文將根據(jù)具體的公司策略對三種定位方法進行介紹。
以特斯拉為例的一類企業(yè)傾向于使用基于視覺的Visual SLAM(簡稱VSLAM)技術(shù)進行定位,他們將盡可能多的視覺傳感器置入汽車中,不依靠預先錄制的地圖,而是希望將圖像處理和機器學習結(jié)合起來,讓特斯拉車輛能夠?qū)χ車h(huán)境做到實時了解。特斯拉車輛隨時隨地都在學習并與其他車輛分享知識。他們依靠周圍的實時環(huán)境數(shù)據(jù)而不是歷史數(shù)據(jù),不存在依賴過時地圖而出錯的風險。
特斯拉的目標非常明確,即建造可以在任何條件下駕駛的車輛而不受周圍環(huán)境的影響。前段時間特斯拉的芯片發(fā)布會上,因馬斯克diss激光雷達還引起了一場軒然大波。馬斯克說,使用激光雷達的定位方法擺脫了“丑陋,昂貴且不必要”的繪圖設(shè)備,為此付出的代價是在處理不確定性時更加依賴相機和軟件。特斯拉人工智能高級主管 Andrej Karpathy 強調(diào)物理數(shù)據(jù)的作用是無法代替的,相對于利用激光雷達建立虛擬高精地圖來說,特斯拉更相信現(xiàn)實的物理數(shù)據(jù),看圖比看雷達更真實。
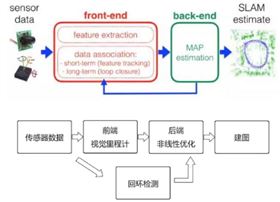
目前,使用VSLAM實現(xiàn)定位的自動駕駛車輛主要配備三類傳感器:單目、雙目(或多目)、RGBD。此外還有魚眼、全景等特殊相機,由于在研究和產(chǎn)品中都屬于少數(shù)在此不做介紹。就實現(xiàn)難度而言,這三類方法難易程度從難到易依次為:單目視覺、雙目視覺、RGBD。在定位過程中,VSLAM自動駕駛車輛從一個未知環(huán)境中的未知地點出發(fā),在運動過程中通過以上這些視覺傳感器觀測定位自身位置、姿態(tài)、運動軌跡,再根據(jù)自身位置進行增量式的地圖構(gòu)建,從而達到同時定位和地圖構(gòu)建的目的。定位和建圖是兩個相輔相成的過程,地圖可以提供更好的定位,而定位也可以進一步擴建地圖。
通用汽車和奔馳都看好通過激光雷達或GPS預先制作的高精地圖來進行定位的方法。通用汽車于2017年收購了自己的激光雷達供應(yīng)商。福特與百度合作,向一家激光雷達供應(yīng)商Velodyne 投資1.5億美元,奔馳也與Velodyne簽訂激光雷達供應(yīng)合約。
激光雷達是非常傳統(tǒng)的定位傳感器。它可以提供機器人本身與周圍環(huán)境障礙物間的距離信息。電路板廠獲悉,常見的激光雷達有SICK、Velodyne、Rplidar等。使用激光雷達制作高精地圖,實際上就是利用激光點云融合技術(shù)進行激光雷達掃描,返回場景分布點的技術(shù)。激光點云融合的技術(shù)又分為兩種,一是基于點云融合的算法,其應(yīng)用場景較廣,不僅限于GPS場景;第二種是基于比較精確的差分GPS和精確慣導,其對場景依賴較強,必須在比較開闊的場景使用,對于高架橋等GPS信號弱的場景效果不佳。基于圖像和GPS技術(shù)解決方案精度比較差,主要用來制作L2、L3的ADAS地圖,而激光點云則可以滿足L4、L5的需求。
這類車輛依賴于預先記錄好的3D高分辨率地圖,而這些地圖是使用配備激光雷達的車輛預先捕獲的。然后,自動駕駛車輛可以使用其自身配備的激光雷達設(shè)備獲取周邊環(huán)境的信息,與預先制作的高精地圖進行比對,判斷環(huán)境是否已經(jīng)改變,然后在地圖涵蓋區(qū)域內(nèi)實現(xiàn)自動駕駛。這顯示了相對來說更加廣泛的自動駕駛策略。為了保持地圖的準確性和車輛的可用性,需要市政當局和汽車制造商之間更廣泛的合作,以創(chuàng)建和維護最新的高精度地圖供車輛使用。
 手機通訊副板
手機通訊副板 5G基站天線板
5G基站天線板器板") 通訊服務(wù)器板
通訊服務(wù)器板 光模塊
光模塊